



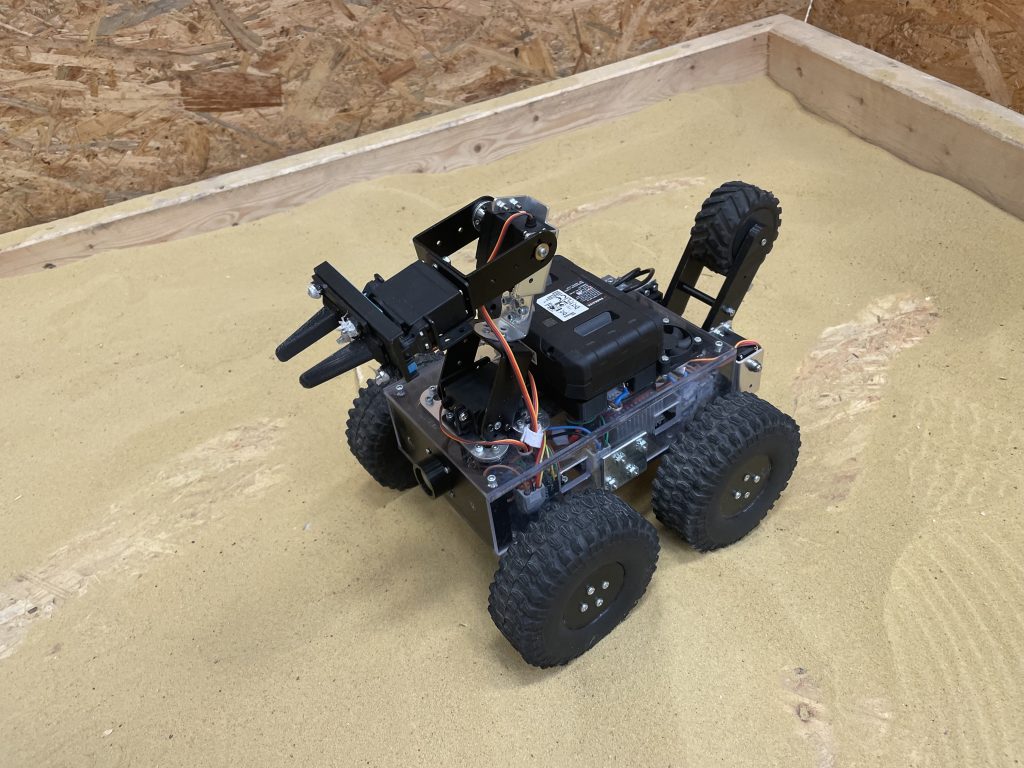
A Nyíregyházi Széchenyi István Technikum tanulóit ismét támogattuk az 2024-es RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülésükkor. Ezúttal a Kókány Corporations csapata az előkelő 3. helyezést érte el.
A Nyíregyházi Széchenyi István Technikum tanulóit ismét támogattuk az 2024-es RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülésükkor. Ezúttal a Kókány Corporations csapata az előkelő 3. helyezést érte el.
2024. június 2-án Balázs és Botond iskolájukkal indultak a 33. Országos Tudományos és Innovációs Olimpián, ahol 2. helyezést, valamint a KMTA (Kárpát-medencei Tehetségkutató Alapítvány) különdíját szerezték meg.

Az újpesti diákok csapata, a KulinSat indult az ESA magyarországi CanSat versenyén, melyre egy 0.33 literes üdítődoboz méretű mini műholdat kellett készíteniük. Ennek megvalósításához többek közt hőmérséklet, páratartalom, légnyomás, gyorsulás érzékelő szenzorokkal, GPS modullal, 3D nyomtatási lehetőséggel, valamint szakmai tanácsadással segítettük őket.

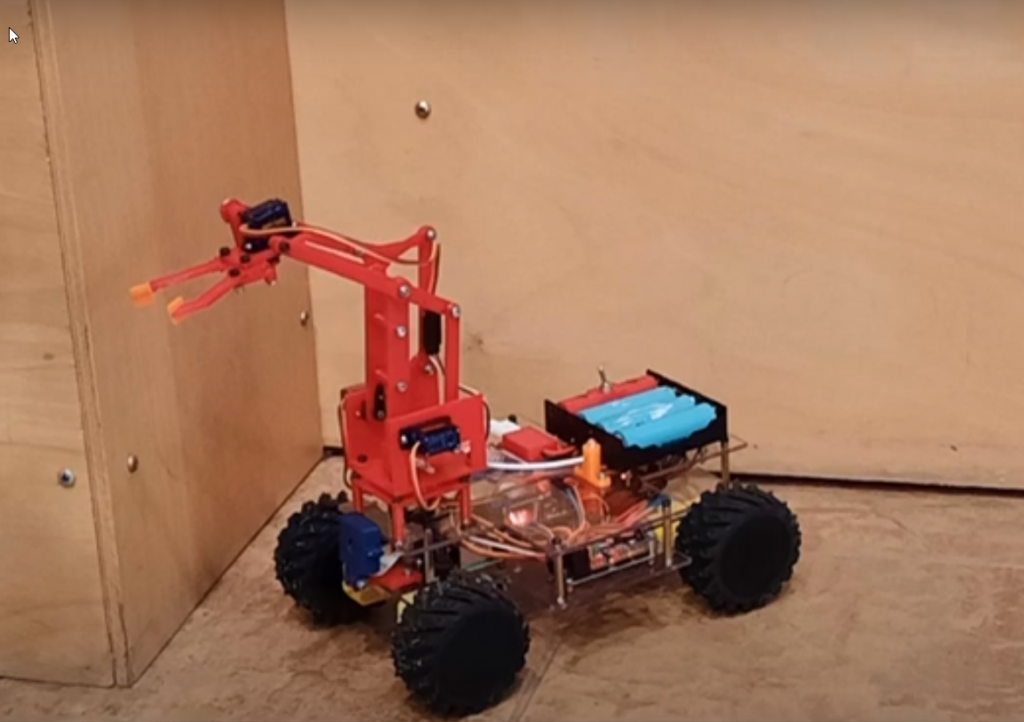
A Nyíregyházi Széchenyi István Technikum egy tanulója keresett meg minket csapatával az RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülve. Munkájukat alkatrészekkel és tanácsokkal segítettük.
Orsolya megkeresésére napelemmel fűthető kutyatál projektjében segédkeztünk alkatrészekkel és tanácsokkal.

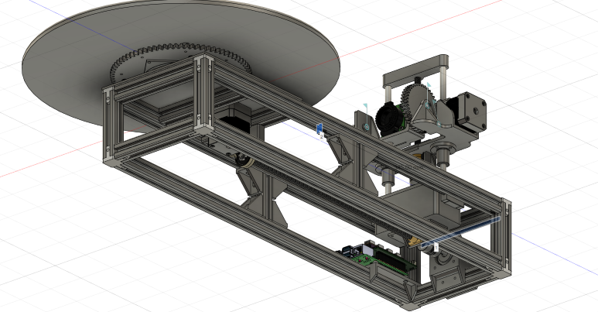
Az Esztergomi Dobó Katalin Gimnázium 10.-es diákjainak csapata (Mudrák Balázs és Szabadi Botond) egy fotogrammetria 3D szkennerrel jelentkezett a Magyar Innovációs Szövetség Ifjúsági Tudományos és Innovációs Tehetségkutató Versenyénre, melyen tervünket további kidolgozásra javasolták, ezzel sikeresen bejutottunk a második fordulóba. Alkatrészekkel és modulokkal támogatjuk a projektjüket. Sok sikert kívánunk!
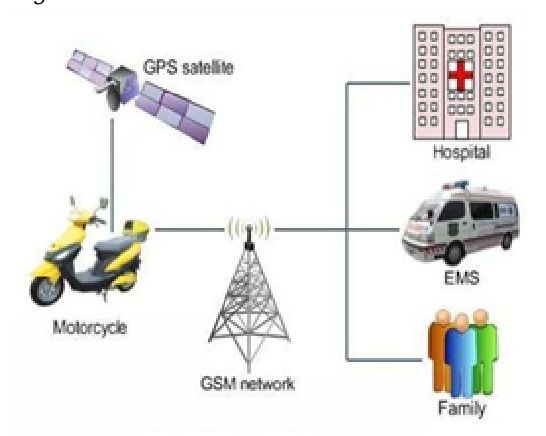
Most az Óbudai egyetem diákjának, Bertalannak a projektjét támogattuk meg eszközökkel, szenzorokkal, és a fejlesztéshez programozási segítségnyújtással, és ingyenes 3D nyomtatási lehetőséggel.
.

Szenzorokkal és konverterekkel támogatjuk a magyar csapatot az idei versenyszezonban. Munkájukhoz sok sikert kívánunk!
Gábor roller projektje egyike a támogatott diák járműveinknek. Egyedi építésű, saját fejlesztésű akkucsomag váltó rendszerrel, kapacitás menedzsmenttel és külön kondenzátoros visszatöltés mellett egyedi hálózati gyorstöltéssel (20-30perc), ő 3D tervezte és nyomtatta az alkatrészeket is.
Kövessétek ti is bejegyzéseit és képeit pl. instagramm oldalán:



















