
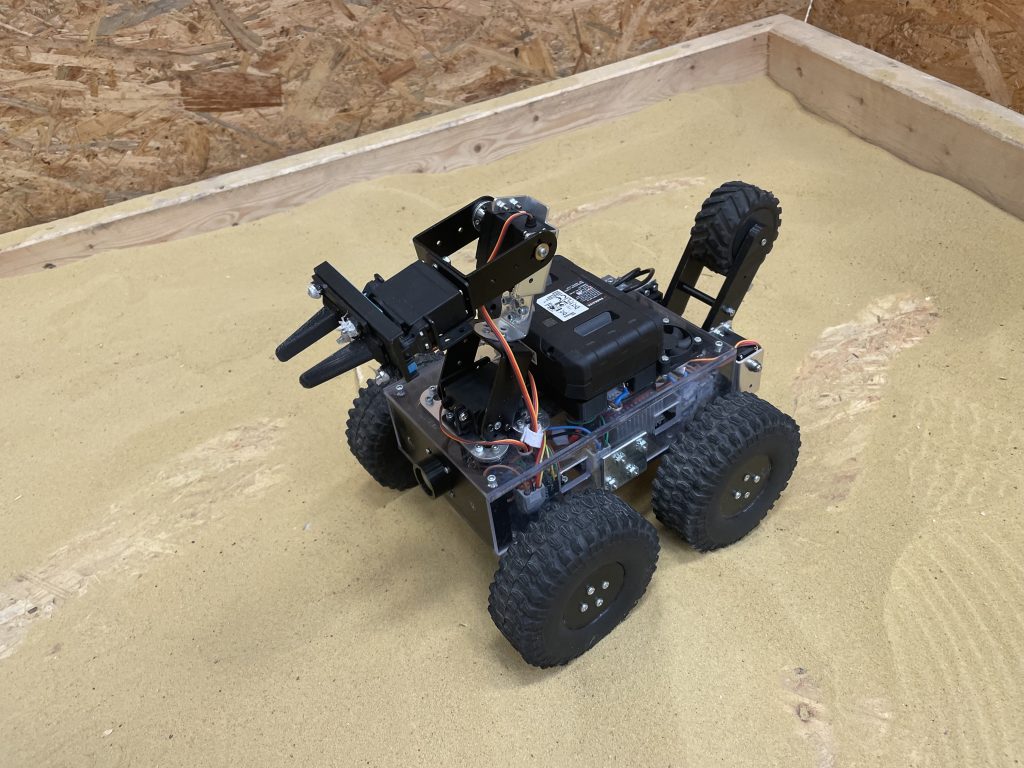
A Nyíregyházi Széchenyi István Technikum tanulóit ismét támogattuk az 2024-es RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülésükkor. Ezúttal a Kókány Corporations csapata az előkelő 3. helyezést érte el.



Támogatjuk az egyetemi-, középiskolás-, és általános-iskolás csapatokat, versenyeket, kutatás fejlesztési projekteket. Célunk, hogy a rászorulók, és a kevesebb büdzsével rendelkező egyéni diákok, versenyzők, és csapatok és hozzájuthassanak a modern eszközökhöz, és színvonalas oktatásban legyen részük.
Megújuló és környezettudatos fejlesztések, projektek, versenyek támogatása.
A Nyíregyházi Széchenyi István Technikum tanulóit ismét támogattuk az 2024-es RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülésükkor. Ezúttal a Kókány Corporations csapata az előkelő 3. helyezést érte el.
2024. június 2-án Balázs és Botond iskolájukkal indultak a 33. Országos Tudományos és Innovációs Olimpián, ahol 2. helyezést, valamint a KMTA (Kárpát-medencei Tehetségkutató Alapítvány) különdíját szerezték meg.

Az újpesti diákok csapata, a KulinSat indult az ESA magyarországi CanSat versenyén, melyre egy 0.33 literes üdítődoboz méretű mini műholdat kellett készíteniük. Ennek megvalósításához többek közt hőmérséklet, páratartalom, légnyomás, gyorsulás érzékelő szenzorokkal, GPS modullal, 3D nyomtatási lehetőséggel, valamint szakmai tanácsadással segítettük őket.

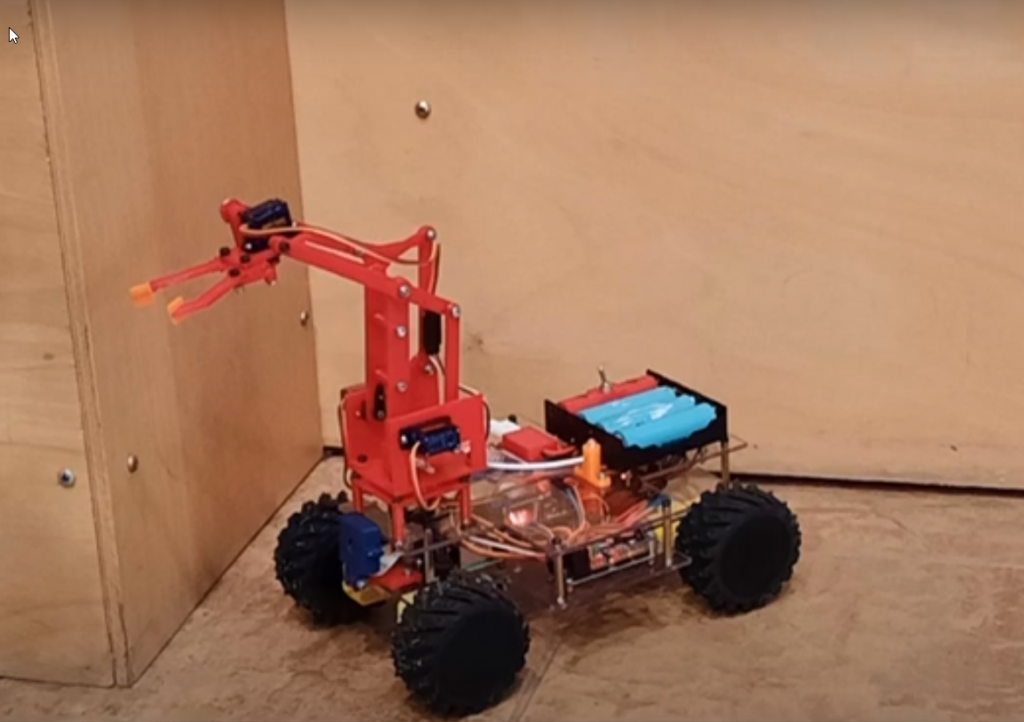
A Nyíregyházi Széchenyi István Technikum egy tanulója keresett meg minket csapatával az RMRC (Gyors építésű menekítő robot) liga nemzetközi döntőjére készülve. Munkájukat alkatrészekkel és tanácsokkal segítettük.
Orsolya megkeresésére napelemmel fűthető kutyatál projektjében segédkeztünk alkatrészekkel és tanácsokkal.

Az Esztergomi Dobó Katalin Gimnázium 10.-es diákjainak csapata (Mudrák Balázs és Szabadi Botond) egy fotogrammetria 3D szkennerrel jelentkezett a Magyar Innovációs Szövetség Ifjúsági Tudományos és Innovációs Tehetségkutató Versenyénre, melyen tervünket további kidolgozásra javasolták, ezzel sikeresen bejutottunk a második fordulóba. Alkatrészekkel és modulokkal támogatjuk a projektjüket. Sok sikert kívánunk!
Most az Óbudai egyetem diákjának, Bertalannak a projektjét támogattuk meg eszközökkel, szenzorokkal, és a fejlesztéshez programozási segítségnyújtással, és ingyenes 3D nyomtatási lehetőséggel.
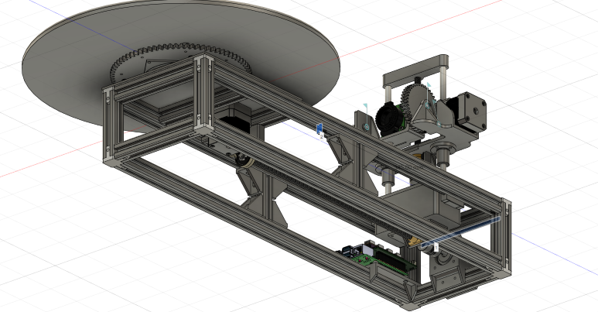
Az Óbudai egyetem kollégája egy olyan RC autót fejleszt diplomamunkának, ami a “hagyományos” üzemmódon felül – melynél szintén autonóm működésre képes – a hátsó két kerekén egyensúlyozni is tud (hasonlóan a Segwayekhez és hoverboardokhoz).

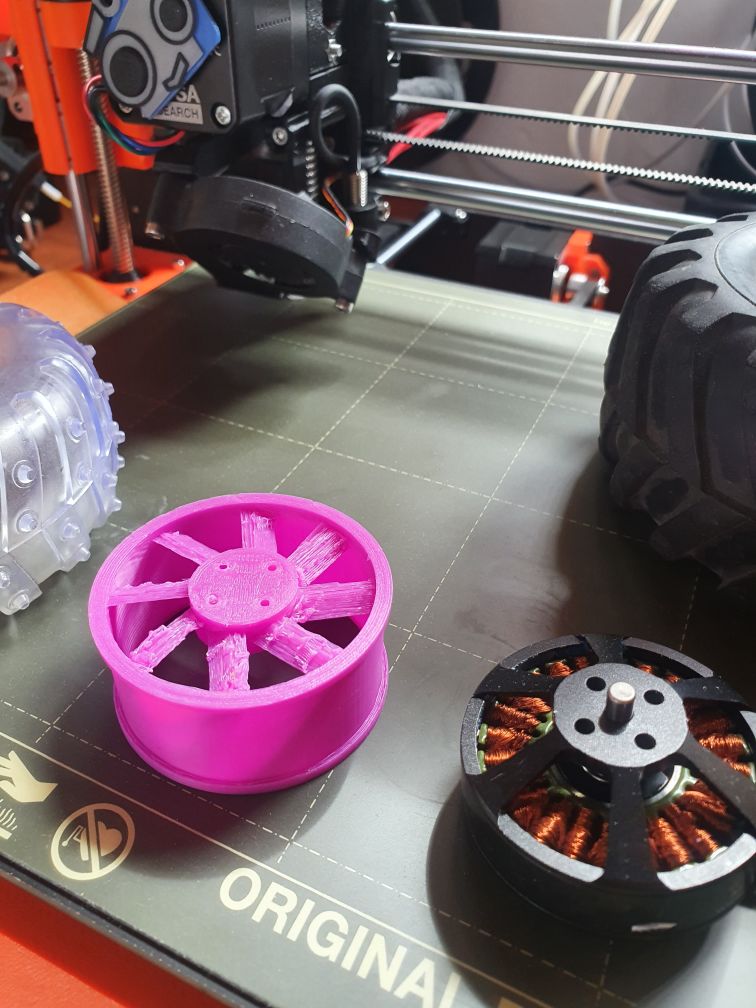
A gyári hajtáslánc helyett teljesen egyedi meghajtás készült. Ugyanis ahhoz, hogy elegendő nyomaték, és elég finom szabályozhatóság legyen, brushless kefenélküli agymotorok kerültek beépítésre, melyet mi biztosítottunk munkájához. Ráadásul a hátsó kerekek külön-külön hajtása szükséges, hogy egyensúlyozó módban fordulni is képes legyen.
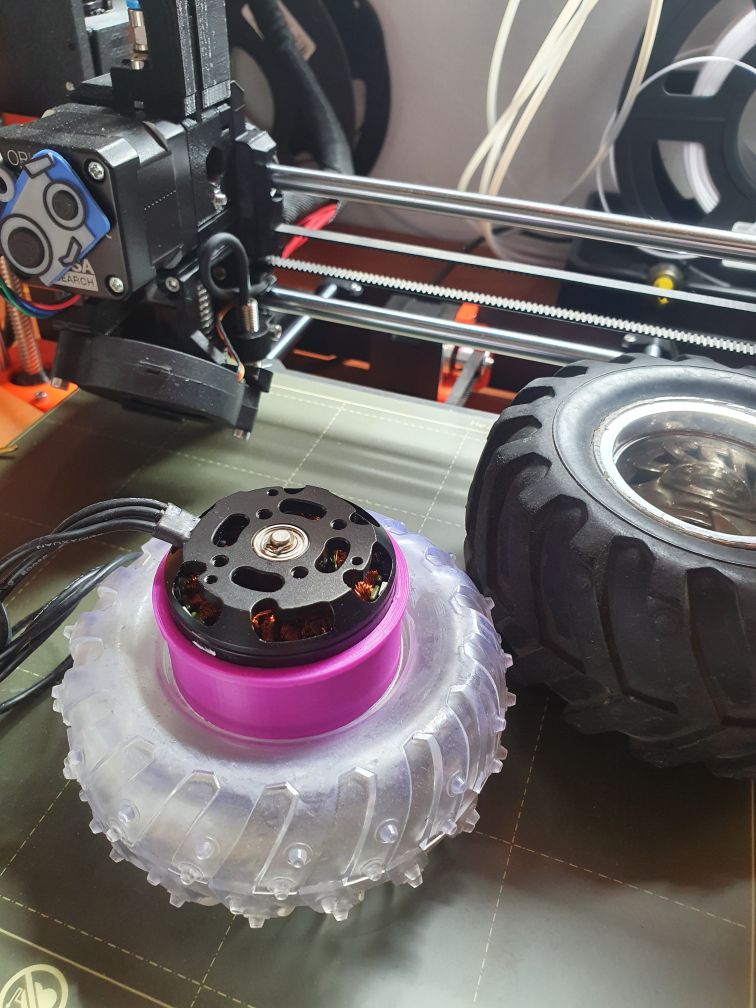
Ehhez egyedi felniket tervezett, melyet nálunk nyomtatott. A felnik különlegessége, hogy normál módban nagy sebességnél a léghűtést is biztosítják a motoroknak, a speciális lapátoknak köszönhetően.
Egyedi hallszenzorokkal készült, a vektoros meghajtáshoz a fejlesztés során “Odrive” meghajtót, “Bruhsless Gimbal” meghajtót kölcsönöztünk, majd később saját egyedi tervezésű vektoros vezérlő készült.
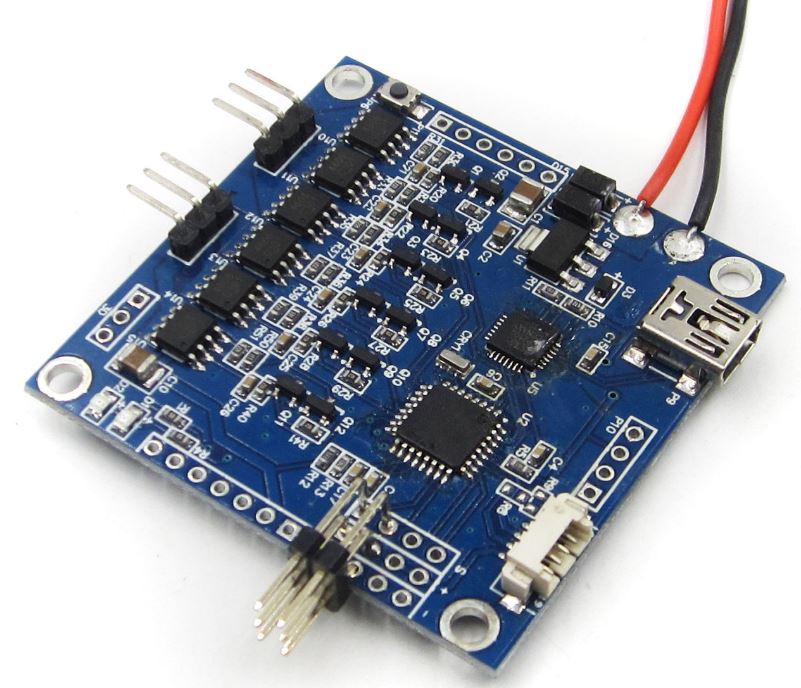
Az egyensúlyozó mikroprocesszor MPU9250 szenzort használ, mely beépített 3 tengelyes giroszkóp és gyorsulás érzékelőt használ az orientáció meghatározására. A fontos tulajdonsága ezen új IMU-knak, hogy már rengeteg féle belső szűrő kapcsolható be, így csökkenti a külső rezgések hatását, de természetesen Kálmán-szűrő fut a mikroprocesszoron.
A projektjében szintén segítséget nyújtanak korábbi BME-es RobonAUT csapattagok, akik nálunk szakmaigyakorlatoztak, az RC autók autonóm működésével kapcsolatban már nagy tapasztalattal rendelkeznek.
Reméljük hamarosan az elkészült projekt videóival frissíthetjük bejegyzésünket.
Prototípusuk építésében alkatrészekkel és tanácsokkal támogatjuk a “Kombány” csapatot, honlapjuk ide kattintva érhető el.




















