



Az Óbudai egyetem kollégája egy olyan RC autót fejleszt diplomamunkának, ami a “hagyományos” üzemmódon felül – melynél szintén autonóm működésre képes – a hátsó két kerekén egyensúlyozni is tud (hasonlóan a Segwayekhez és hoverboardokhoz).

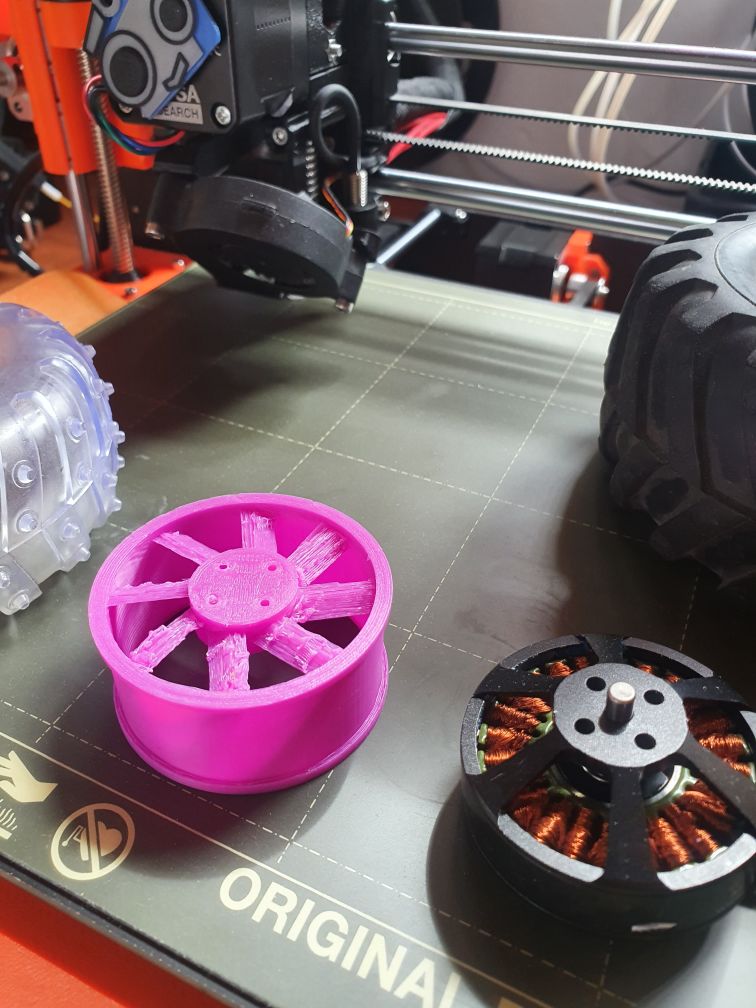
A gyári hajtáslánc helyett teljesen egyedi meghajtás készült. Ugyanis ahhoz, hogy elegendő nyomaték, és elég finom szabályozhatóság legyen, brushless kefenélküli agymotorok kerültek beépítésre, melyet mi biztosítottunk munkájához. Ráadásul a hátsó kerekek külön-külön hajtása szükséges, hogy egyensúlyozó módban fordulni is képes legyen.
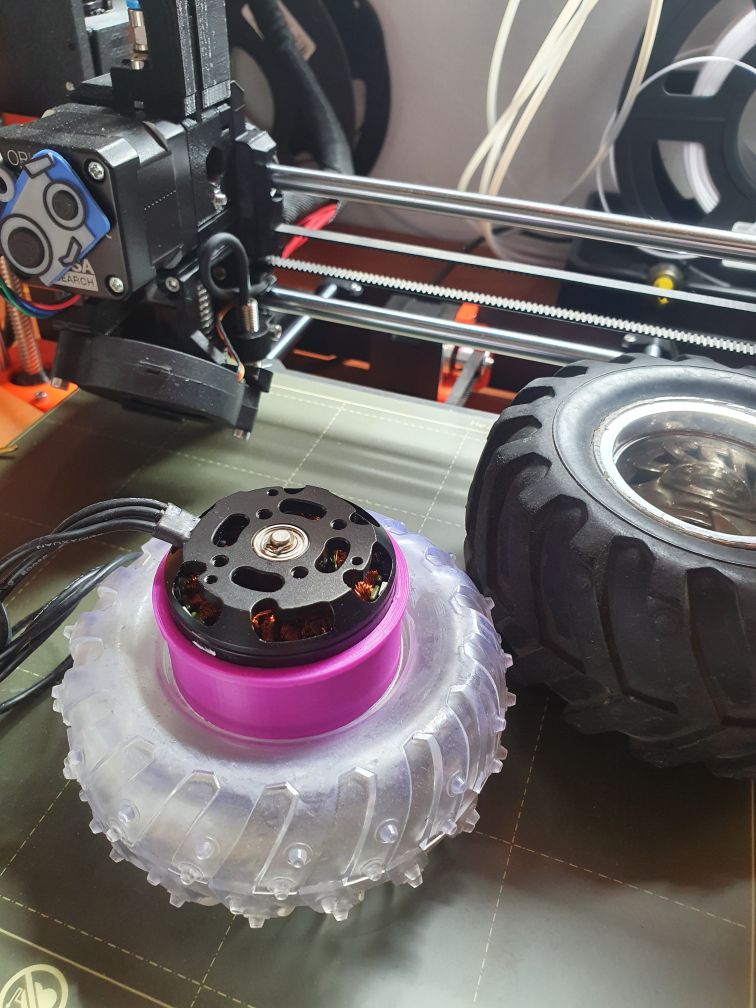
Ehhez egyedi felniket tervezett, melyet nálunk nyomtatott. A felnik különlegessége, hogy normál módban nagy sebességnél a léghűtést is biztosítják a motoroknak, a speciális lapátoknak köszönhetően.
Egyedi hallszenzorokkal készült, a vektoros meghajtáshoz a fejlesztés során “Odrive” meghajtót, “Bruhsless Gimbal” meghajtót kölcsönöztünk, majd később saját egyedi tervezésű vektoros vezérlő készült.
Az egyensúlyozó mikroprocesszor MPU9250 szenzort használ, mely beépített 3 tengelyes giroszkóp és gyorsulás érzékelőt használ az orientáció meghatározására. A fontos tulajdonsága ezen új IMU-knak, hogy már rengeteg féle belső szűrő kapcsolható be, így csökkenti a külső rezgések hatását, de természetesen Kálmán-szűrő fut a mikroprocesszoron.
A projektjében szintén segítséget nyújtanak korábbi BME-es RobonAUT csapattagok, akik nálunk szakmaigyakorlatoztak, az RC autók autonóm működésével kapcsolatban már nagy tapasztalattal rendelkeznek.
Reméljük hamarosan az elkészült projekt videóival frissíthetjük bejegyzésünket.



















Vélemény, hozzászólás?
Hozzászólás küldéséhez be kell jelentkezni.