









Product Description
Sabertooth 2X5 R/C is a dual motor driver specifically optimized for use in radio controlled vehicles. It is suitable for small robots, cars and boats, and especially well suited for the Antweight and Beetleweight classes of fighting robots.
Out of the box, it can supply two DC brushed motors with up to 5A each. Peak currents of 10A are achievable for a few seconds. Overcurrent and thermal protection means you'll never have to worry about killing the driver with accidental stalls or by hooking up too big a motor.
This R/C version comes with an invert channel and options for exponential control, autocalibration and built-in mixing. The operating mode is set with the onboard DIP switches so there are no jumpers to lose.
Sabertooth is the first synchronous regenerative motor driver in its class. The regenerative topology means that your batteries get recharged whenever you command your robot to slow down or reverse. Sabertooth also allows you to make very fast stops and reverses - giving your vehicle a quick and nimble edge.
Sabertooth has a built in 5V BEC that can provide power to a microcontroller or R/C receiver. The lithium cutoff mode allows Sabertooth to operate safely with lithium ion and lithium polymer battery packs - the highest energy density batteries available.
Sabertooth's transistors are switched at ultrasonic speeds (32kHz) for silent operation.
Use of our motor drivers with cheap AC adapters is not recommended. Use a battery or at least put a battery in parallel with a DC supply.
Need more power? Take a look at Sabertooth 2X12 R/C.
Product Specs
| Specifications: | 18g / 0.6oz Input Voltage: 6V to 18V, 6-12 cell NiMH or NiCd, 2s-4s LiPo, 6V or 12V lead acid (not 18+V lead acid!) 5A continuous per channel, 10A peak Synchronous regenerative drive Ultra-sonic switching frequency Thermal and overcurrent protection Lithium protection mode Size: 1.8” x 1.6 ” x .5” 45 x 40 x 13 mm 5" / 13cm servo pigtails |
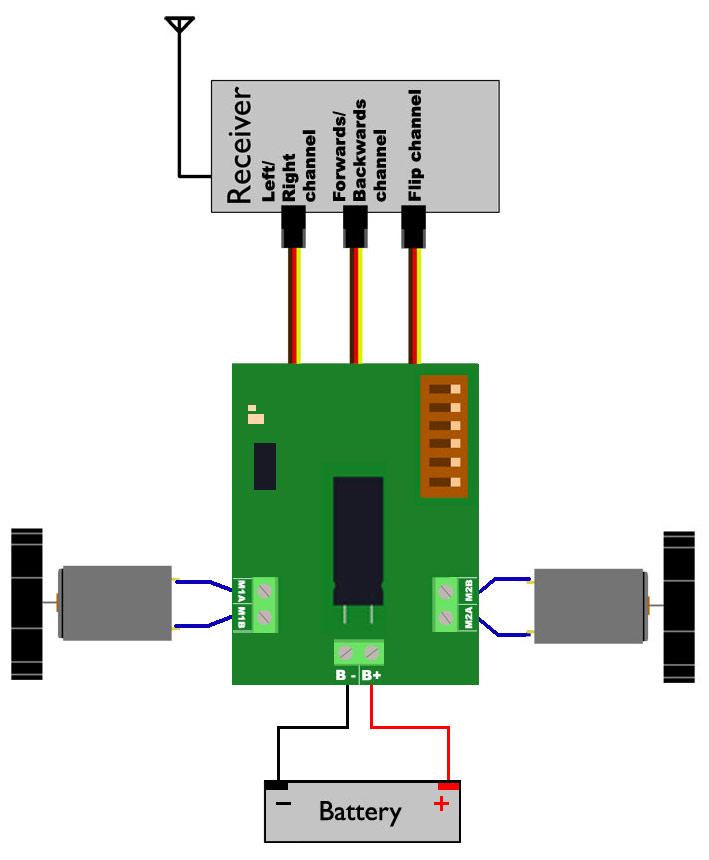
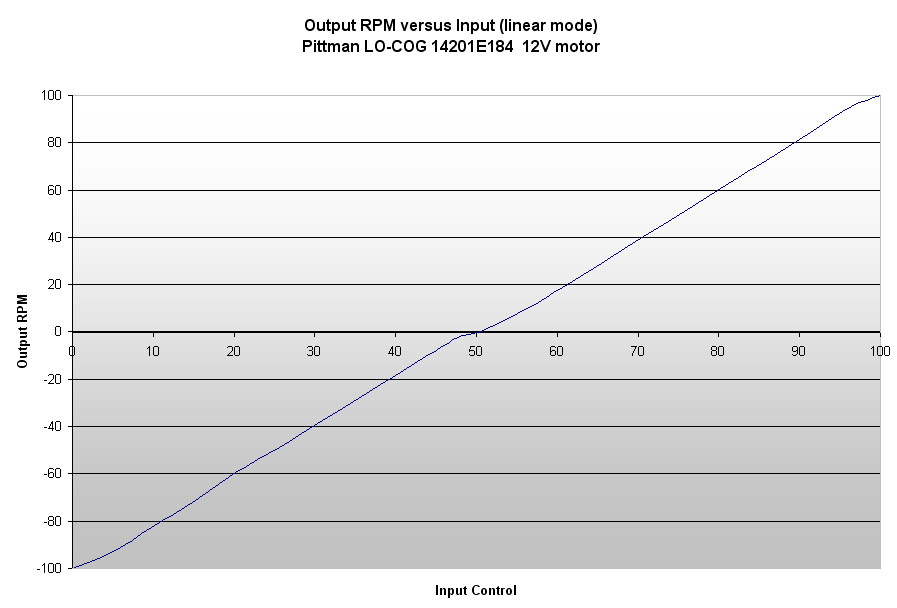
| Documentation: | DIP Switch Tour Quick start guide.doc Quick start guide.pdf Example R/C vehicle wiring diagram.jpg Sample RPM versus throttle graph |
| Applications: | Ant/Beetleweight combat robots Differential drive robots up to 20lb Radio controlled tanks, cars and boats Evil cyborg cats |
| Application notes: | Using a SyRen/Sabertooth with an ATX (or similar) DC power supply Building a simple robot |
Kapcsolódó termékek










{kind=link}
{kind=link}
Kapcsolódó cikkek
Vélemények (küldje be Ön is véleményét)
Cégünk elektronikai és szoftveres fejlesztésekkel foglalkozik, ami mellett internetes kereskedelmet is indítottunk az ehhez kapcsolódó modulok és fejlesztő egységekkel. Már több mint 15.000 féle termék rendelhető, melyből több mint 5000 saját raktárunkról azonnal elérhető. Fiatal cégként dinamikusan bővülünk, alkalmazkodunk a modern igényekhez. Támogatjuk a hazai fejlesztéseket, és diákokat, termékekkel, szolgáltatásokkal, és saját tudásunkkal. Rendszeres vásárlóink között tudhatunk rengeteg magyar nagyvállalatot, oktatási intézményt, megbízóink között pedig több fejlődő kis- és közép- vállalkozást.
2016-tól mi béreljük az elektrobot.hu-t, mely egy közösségi blog és híroldalként indult, ezen keresztül korábban több elektronikai cég forgalmazott, és jelenleg is hírdeti szolgáltatásait. Rendszeresen jelen vagyunk a magyar elektronikai fórumokon online és kiállítások, rendezvények formájában. Próbáljuk összehozni az oktatásban és versenyeken résztvevőket a fiatal cégekkel, és a komolyabb megbízókkal.